敵ロボットをターンさせる2
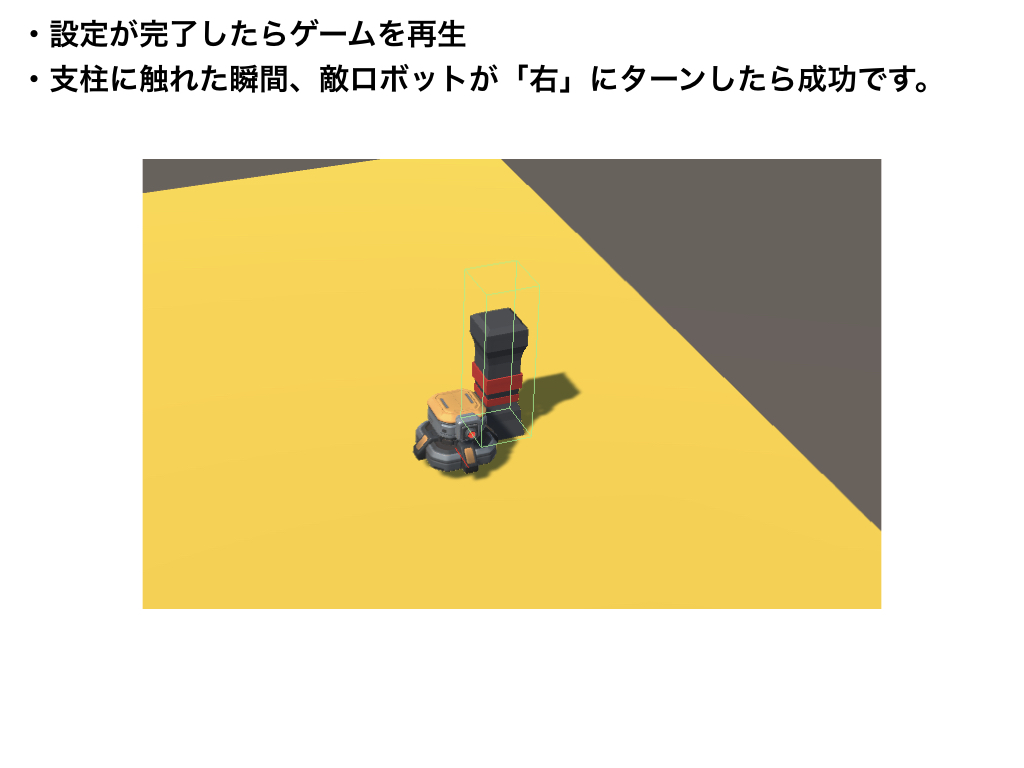
敵を右にターンさせる
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class EnemyTurn : MonoBehaviour
{
private float maxDistance = 0.5f;
private string tagName;
void Update()
{
RaycastHit hit;
Ray ray = new Ray(transform.position, transform.forward);
Debug.DrawRay(transform.position, transform.forward * 0.5f, Color.red);
if(Physics.Raycast(ray, out hit, maxDistance))
{
GameObject target = hit.collider.gameObject;
tagName = target.tag;
switch(tagName)
{
case "RedPillar_L":
transform.root.localRotation = Quaternion.Euler(0, transform.root.eulerAngles.y + 270, 0);
break;
// ★追加(右にターンさせる)
case "RedPillar_R":
transform.root.localRotation = Quaternion.Euler(0, transform.root.eulerAngles.y + 90, 0);
break;
}
}
}
}
【2019版】TowerD I(基礎/全10回)
| 1 | 敵ロボットの作成&前進 |
| 2 | 敵ロボットをターンさせる1 |
| 3 | 敵ロボットをターンさせる2 |
| 4 | 敵ロボットにHPをつける |
| 5 | ロボットを生み出す装置を作る |
| 6 | マイロボットの作成1 |
| 7 | マイロボットにライフタイムを設定する |
| 8 | マイロボットの作成2 |
| 9 | ★チェックポイント |
| 10 | ★チャレンジ |
敵を右にターンさせる
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class EnemyTurn : MonoBehaviour
{
private float maxDistance = 0.5f;
private string tagName;
void Update()
{
RaycastHit hit;
Ray ray = new Ray(transform.position, transform.forward);
Debug.DrawRay(transform.position, transform.forward * 0.5f, Color.red);
if(Physics.Raycast(ray, out hit, maxDistance))
{
GameObject target = hit.collider.gameObject;
tagName = target.tag;
switch(tagName)
{
case "RedPillar_L":
transform.root.localRotation = Quaternion.Euler(0, transform.root.eulerAngles.y + 270, 0);
break;
// ★追加(右にターンさせる)
case "RedPillar_R":
transform.root.localRotation = Quaternion.Euler(0, transform.root.eulerAngles.y + 90, 0);
break;
}
}
}
}敵ロボットをターンさせる2