【2019版】TowerD I(基礎/全10回)
| 1 | 敵ロボットの作成&前進 |
| 2 | 敵ロボットをターンさせる1 |
| 3 | 敵ロボットをターンさせる2 |
| 4 | 敵ロボットにHPをつける |
| 5 | ロボットを生み出す装置を作る |
| 6 | マイロボットの作成1 |
| 7 | マイロボットにライフタイムを設定する |
| 8 | マイロボットの作成2 |
| 9 | ★チェックポイント |
| 10 | ★チャレンジ |
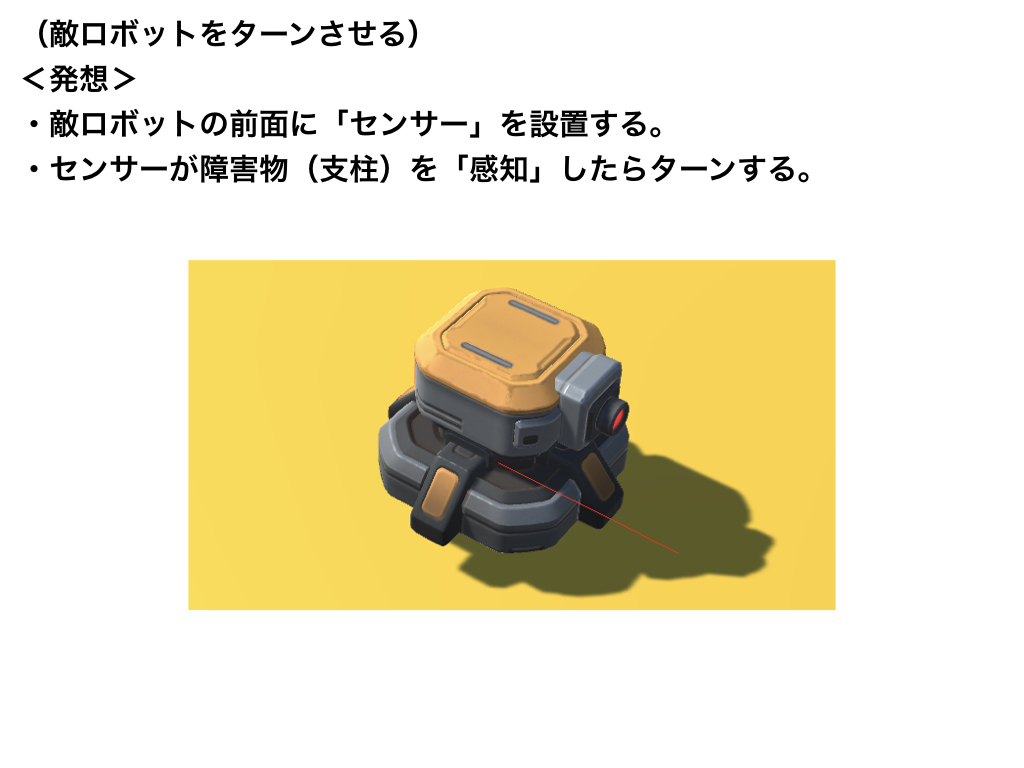
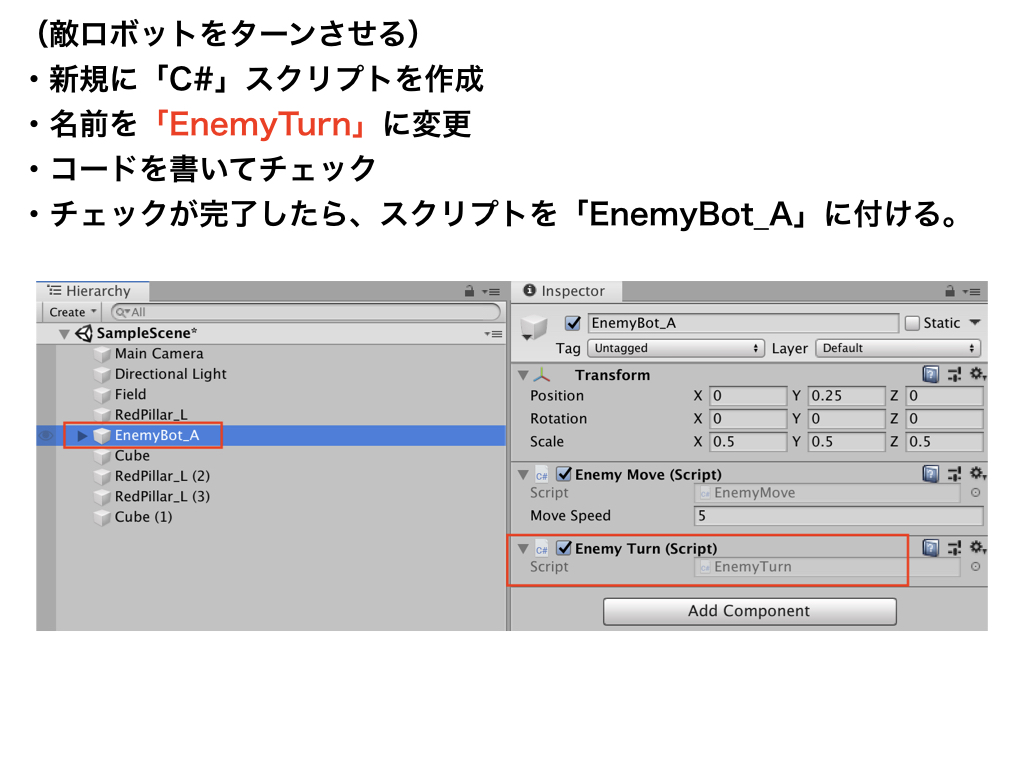
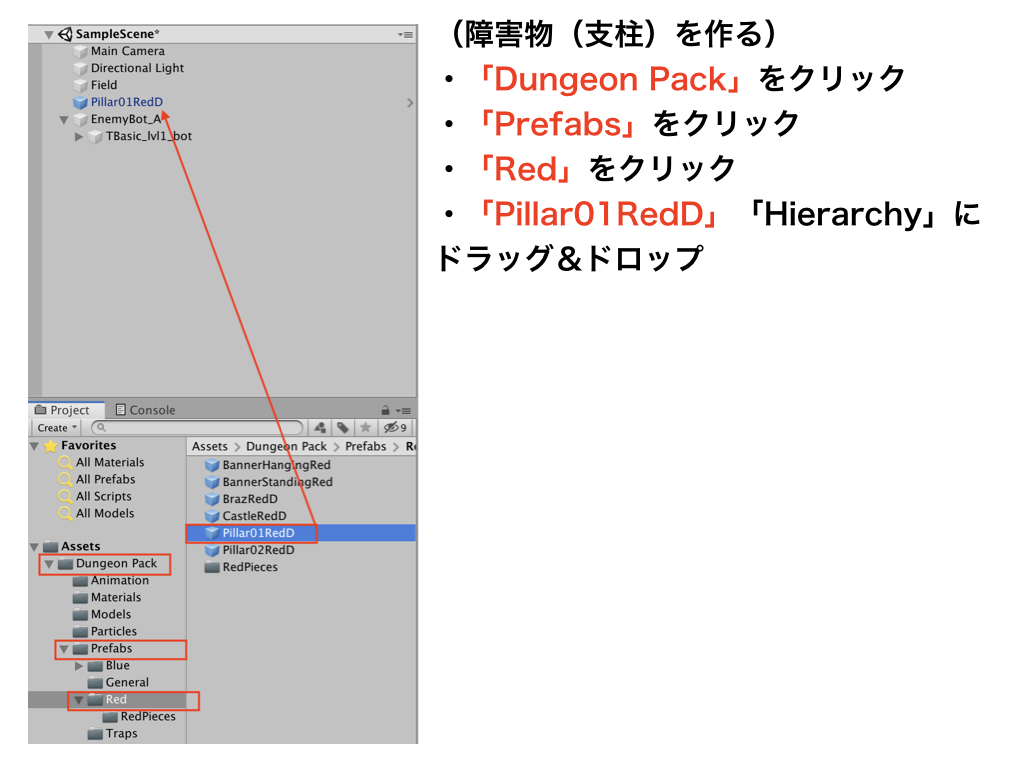
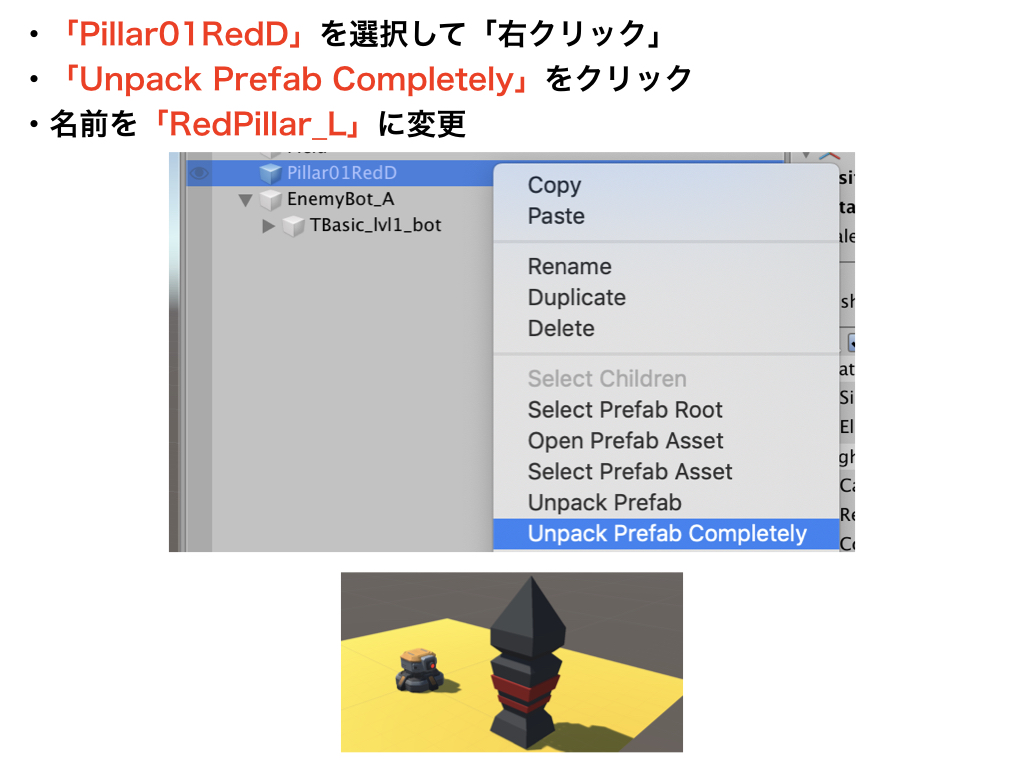
敵ロボットをターンさせる1
| 1 | 敵ロボットの作成&前進 |
| 2 | 敵ロボットをターンさせる1 |
| 3 | 敵ロボットをターンさせる2 |
| 4 | 敵ロボットにHPをつける |
| 5 | ロボットを生み出す装置を作る |
| 6 | マイロボットの作成1 |
| 7 | マイロボットにライフタイムを設定する |
| 8 | マイロボットの作成2 |
| 9 | ★チェックポイント |
| 10 | ★チャレンジ |